尝试做一个自平衡机器人
这个项目是去年10月份公司组织的一个嵌入系统里的C++编程培训期间做的。这个项目本来是想简单的重复Vertibot. 但是因为预定的部分配件没有能再培训开始前寄到,所以我们就用了备用的一套硬件参考着Vertibot自己搞的。最然因为备用硬件电机的线性响应太差导致最后没有达到预定的效果,不过还是从这个项目中学到了很多东西. 这里我简单总结一些这个项目。
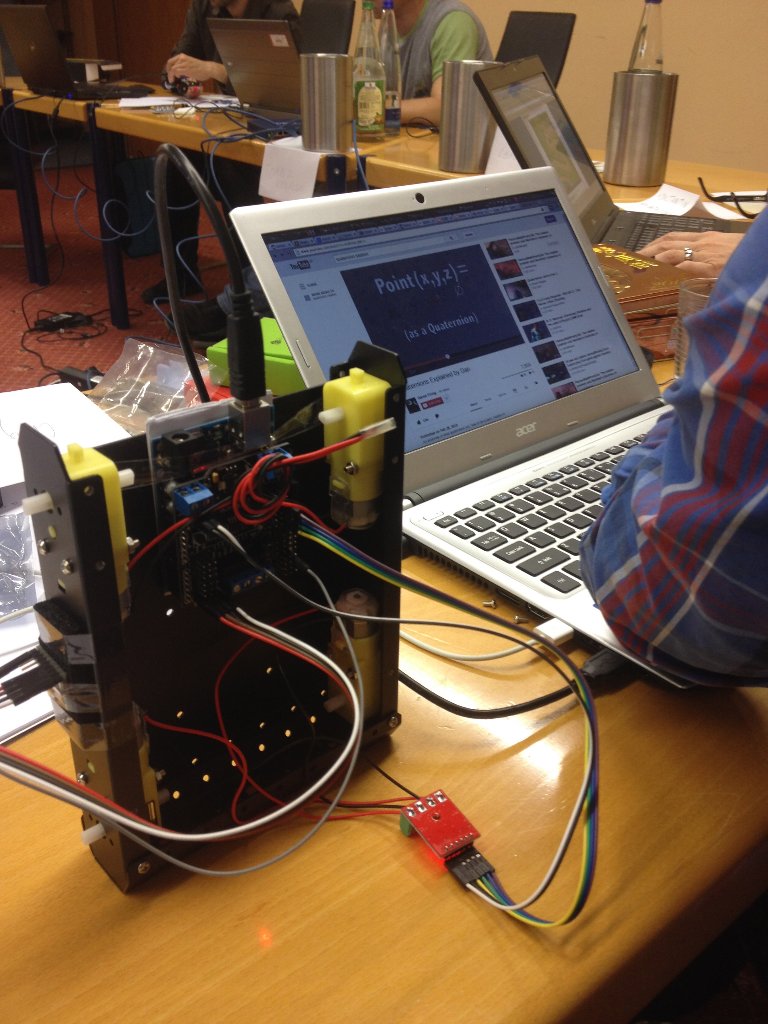
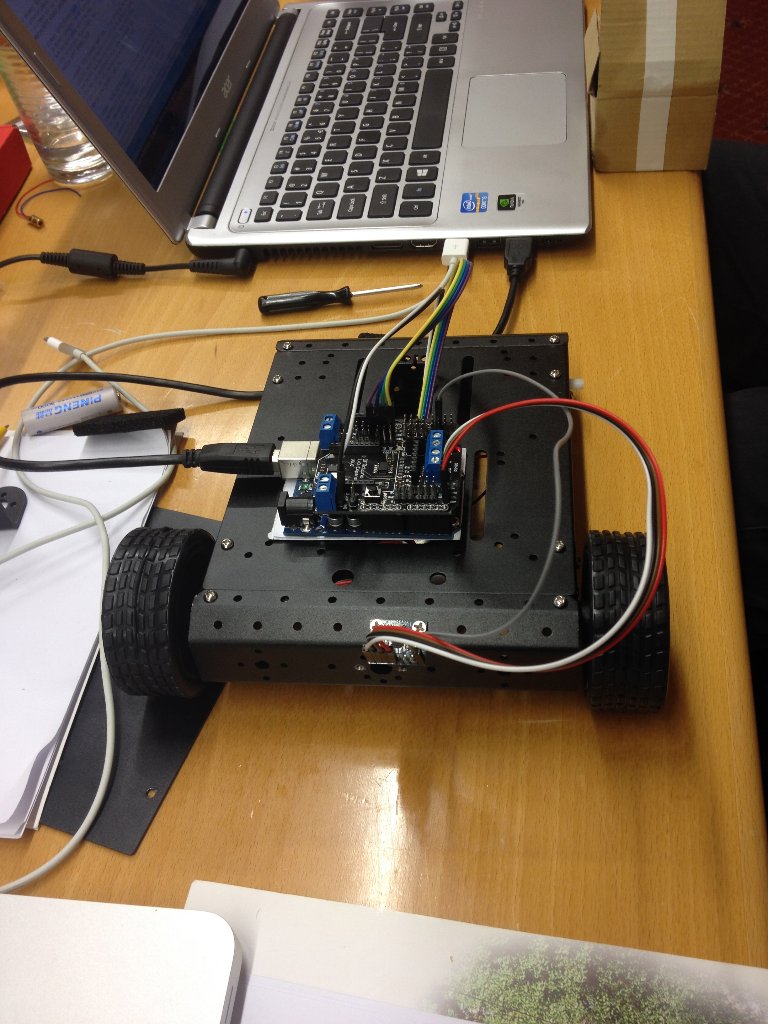
一些照片和视频 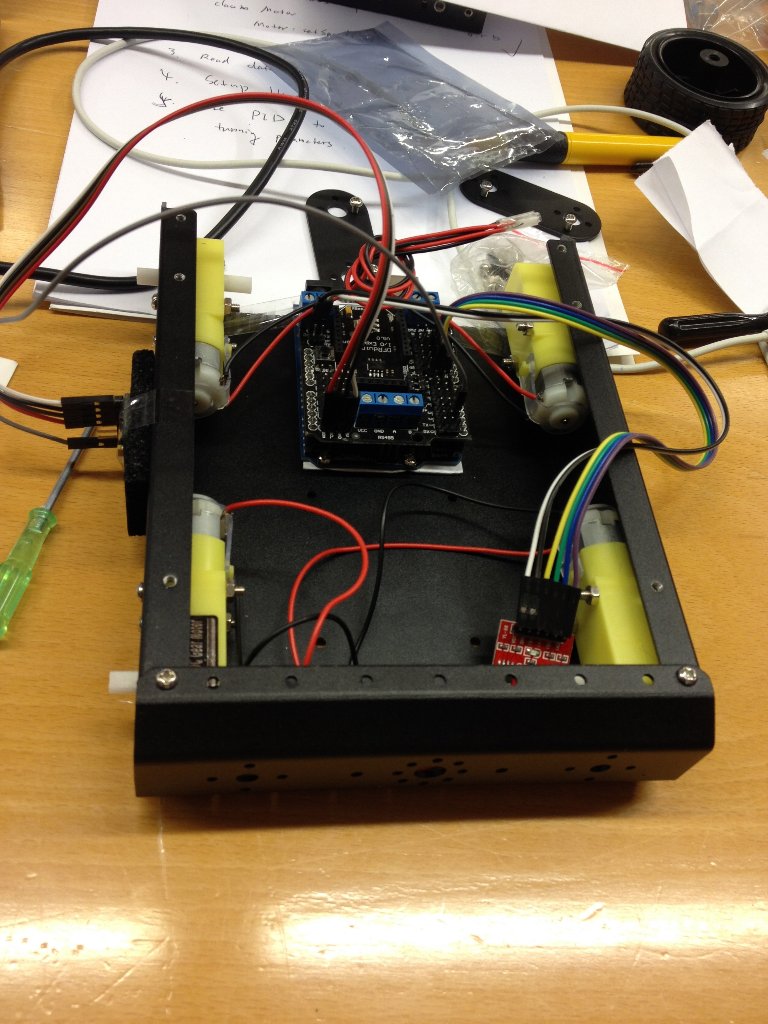
主要硬件清单
- Arduino uno (R3)
- Arduino Xbee传感器扩展板V5
- MPU-6050模块 3三轴陀螺仪+3三轴加速度传感器
- L9110 电机驱动模块 这个功率其实达不到要求不过勉强能用, 调试过程中烧坏了一个.
- Arduino 4WD移动机器人平台 这个平台附带的电机响应性能不能满足自平衡机器人的要求,导致最后没能成功.
- 一些支架零件比如这个
软件
软件可以在这里下载。主要原理是通过PID控制器利用MPU-6050采集的姿势数据来响应的调节电机的速度。因为电机很烂,所以程序里有几行是非常丑陋的适应这个电机的代码,忽略就可以了。
This post is licensed under CC BY 4.0 by the author.